This is the 3rd (and final) part of a tutorial about the Kalman Filter for state estimation. Why do we care about state estimation? State Estimation uses math to do what the brain does automatically: combine noisy sensors into a “best guess” estimate. This lets us observe all kinds of systems that can be defined mathematically.
Part 1 discusses the high-level background on State Estimation and how to create system and measurement models.
Part 2 introduces the Extended Kalman Filter equations needed in order to estimate the state of a robot lawnmower.
Finally, this tutorial discusses implementing the EKF for a differential drive mobile robot (ie., a robot lawnmower!), including pseudocode. Our EKF includes: 1) System Update and 2) GPS Measurement Update. Quick disclaimer on my pseudocode… I wrote this using MATLAB syntax. But I havent tested it, so take it as a “guide.”
Implementing System Update
We’re about to implement the Extended Kalman Filter system update for a mobile robot. Here are the relevant EKF system update equations. For a conceptual discussion on the update equations, refer to KF Tutotial Part 1. As a reminder, 



And remember that our differential drive mobile robot uses the state: ![\boldsymbol{x}=[x,y,\theta,v,\omega]^T](https://s0.wp.com/latex.php?latex=%5Cboldsymbol%7Bx%7D%3D%5Bx%2Cy%2C%5Ctheta%2Cv%2C%5Comega%5D%5ET&bg=ffffff&fg=323232&s=0&c=20201002)






Also, the matrix 

Now lets write some code for the system update, following Matlab notation.
function [state_pre, P_pre] = system_update(state, P, Qk, dt)
% state = [x, y, tht, v, omega]'
% Update State: x_pre = f(x,u), where x=state and u=0
state_pre = [state(1) + state(4)*dt*cos(state(3));
state(2) + state(4)*dt*sin(state(3));
state(3) + state(5)*dt;
state(4);
state(5);
% Calculate Fk
Fk = [ 1 0 -state(4)*dt*sin(state(3)) dt*cos(state(3)) 0;
0 1 state(4)*dt*cos(state(3)) dt*sin(state(3)) 0;
0 0 1 0 dt;
0 0 0 1 0;
0 0 0 0 1];
% Update Covariance: P_pre = F*P*F' + Qk
P_pre = Fk*P*Fk' + Qk
It’s also worth mentioning that 
Implementing GPS Measurement Update
The GPS measurement with a lever arm offset can be expressed as:

Which is what we will use for the GPS measurement update. Here are the EKF Measurement Update equations:



Where 


Lets do the code for the measurement update!
function [state_post, P_post] = meas_update_gps(state, P, z, Rk, dt, off)
% state = [x, y, theta, v, omega]'
% off = [x_off, y_off]' <- this is the lever arm offset
% z = [x_gps, y_gps] <- this is the actual GPS measurement reading
% Calculate Hk
Hk = [ 1 0 -off(1)*sin(state(3))-off(2)*cos(state(3)) 0 0;
0 1 off(1)*cos(state(3))-off(2)*sin(state(3)) 0 0];
% Find the expected measurement: h(state)
gps_est = [state(1) + off(1)*cos(state(3)) - off(2)*sin(state(3));
state(2) + off(1)*sin(state(3)) + off(2)*cos(state(3))];
% Find Kalman Gain
K = P*H'*(H*P*H'+Rk)^-1;
% Find new state:
state_post = state + K*(z-gps_est);
% Find new covariance:
P_post = P - K*Hk*P
Putting it All Together
Now lets pull our two functions together to come up with our Extended Kalman Filter.
function [state, P] = extended_kalman_filter(state, P, z_gps)
% state = [x, y, theta, v, omega]'
% P = covariance matrix
% z_gps = [x_gps, y_gps]
% Goal: Use the new GPS measurement to update the EKF state and covariance
% Set constants (Or pass into the function)
dt = 0.1; % 10 Hz
Q = diag([0.01, 0.01, 0.001, 0.3, 0.3]);
Qk = Qk(dt); % <- System (Process) Noise
R_gps = [0.1^2 0;
0 0.1^2];
Rk_gps = R_gps*dt; % <- Measurement Noise
off = [0.25; 0]; % <- GPS lever arm offset. x_off = 0.25, y_off = 0
% Extended Kalman Filter:
[state_pre, P_pre] = system_update(state, P, Qk, dt);
[state, P] = meas_update_gps(state_pre, P_pre, z, Rk, Rk, dt, off);
We now have a functional extended kalman filter that can be placed inside a loop to estimate the robot state using GPS measurements.
A neat fact: All five states will be observable! It’s true- using GPS measurements plus knowledge of the robot system, it is possible to extract a best guess for position, heading, velocity, and angular velocity of the robot. This same approach can be applied to any other system that can be modeled with differentiable equations… simply replace the EKF equations with the equations for the new system, and you are in business (also make sure your system is Observable- but that’s a discussion for another day).
A couple easy ways to improve our mobile robot Extended Kalman Filter:
- Add new measurements. Everyone wants more measurements! Another typical mobile robot measurement is “wheel odometry” which essentially observes the wheel rotation using incremental sensors attached to the robot. This provides a huge improvement because you can get odometry readings at, say 50 Hz whereas GPS is typically slower.
- Improve the system. Note that the measurement system always uses an old heading to propagate the state. It has been shown that a more precise approach is to use the angular velocity to propagate this heading to the “midpoint” of each measurement. This, naturally, results in a far more complicated system update- But it has significantly better results (maybe an order of magnitude better, depending on how large the timestep dt is).
And of course, the same Extended Kalman Filter procedure applies to many other situations (surprisingly, autonomous robot lawnmowers are not the only use for the EKF). In fact, EKFs are a go-to approach for most state estimation problems in existence today… How do rockets determine their orientation while trying to land? I would take any bet the rocket uses an EKF or EKF-related algorithm. Enjoy the newfound power of state estimation! Thanks for reading.

 , and angular velocity
, and angular velocity  . The forward velocity and angular velocity is taken at the mower origin (your
. The forward velocity and angular velocity is taken at the mower origin (your  point).
point). from timestep
from timestep  to timestep
to timestep  :
: , and a covariance (i.e., uncertainty) matrix,
, and a covariance (i.e., uncertainty) matrix,  .
.

 and
and  represent the nonlinear system and measurement models, respectively. The additive system noise,
represent the nonlinear system and measurement models, respectively. The additive system noise,  , and measurement noise,
, and measurement noise,  , are both zero mean Gaussian noise with associated covariance matrices:
, are both zero mean Gaussian noise with associated covariance matrices:

 and
and  , the functions must be “linearized.” How to do this? Well, you need to take the Jacobians of
, the functions must be “linearized.” How to do this? Well, you need to take the Jacobians of  , during each time step. Interesting, this is the only significant math difference between the Extended Kalman Filter and Kalman Filter. These matrices are:
, during each time step. Interesting, this is the only significant math difference between the Extended Kalman Filter and Kalman Filter. These matrices are: determines how much to rely on the new measurement over the old prediction. If no measurement update is possible, then the update may be skipped by replacing the above equations with simply:
determines how much to rely on the new measurement over the old prediction. If no measurement update is possible, then the update may be skipped by replacing the above equations with simply:

 ), a robot lawnmower moves a certain distance, which happens to be
), a robot lawnmower moves a certain distance, which happens to be  . This motion is distributed between the x and y coordinates according to the lawnmower’s heading. Therefore, we can come up with equations to move the position from timestep
. This motion is distributed between the x and y coordinates according to the lawnmower’s heading. Therefore, we can come up with equations to move the position from timestep 
 ,
,  .
. :
: and
and  . This completes the robot lawnmower GPS measurement.
. This completes the robot lawnmower GPS measurement.
![x=[d,\theta]^T](https://s0.wp.com/latex.php?latex=x%3D%5Bd%2C%5Ctheta%5D%5ET&bg=ffffff&fg=323232&s=0&c=20201002) , what is the antenna angle measured by the sensor? Segment 1 and Segment 2 can each contact the wall in two places:
, what is the antenna angle measured by the sensor? Segment 1 and Segment 2 can each contact the wall in two places:

 and
and  are the lengths of segment 1 and the length of the hypotenuse between segments 1 and 2. These equations result in four different possible angles for the antenna. Now: The next step is to eliminate physically impossible configurations: 1) Antenna Max/Min, 2) Any antenna that passes through the wall at any point (assuming, as always here, that the wall is infinitely flat). The possibilities we are left with are valid antenna configurations. The result below shows the right antenna angle mapped as a function of the distance and heading offset from a wall. I used nominal settings, with antenna segment length of 0.4m and 0.4m each.
are the lengths of segment 1 and the length of the hypotenuse between segments 1 and 2. These equations result in four different possible angles for the antenna. Now: The next step is to eliminate physically impossible configurations: 1) Antenna Max/Min, 2) Any antenna that passes through the wall at any point (assuming, as always here, that the wall is infinitely flat). The possibilities we are left with are valid antenna configurations. The result below shows the right antenna angle mapped as a function of the distance and heading offset from a wall. I used nominal settings, with antenna segment length of 0.4m and 0.4m each.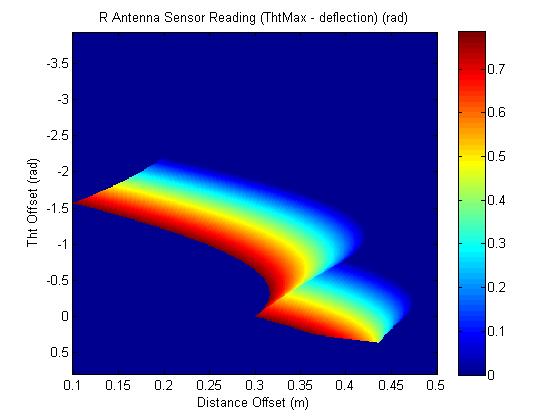


 for 0.50 m, and
for 0.50 m, and  for 0.25 m. So, a smaller cutting area takes exponentially more time than a larger cutting area for a lawnmower using random motion. I could, theoretically, create an equation to solve for the time constant based on the cutting width and desired area. To get a feel for what the random paths look like for the small and large cutting decks, see the representative paths:
for 0.25 m. So, a smaller cutting area takes exponentially more time than a larger cutting area for a lawnmower using random motion. I could, theoretically, create an equation to solve for the time constant based on the cutting width and desired area. To get a feel for what the random paths look like for the small and large cutting decks, see the representative paths:
![x=[x,y,\theta]^T](https://s0.wp.com/latex.php?latex=x%3D%5Bx%2Cy%2C%5Ctheta%5D%5ET&bg=ffffff&fg=323232&s=0&c=20201002) , is it possible to use a Kalman Filter to observe the full state using only
, is it possible to use a Kalman Filter to observe the full state using only ![[x,y]^T](https://s0.wp.com/latex.php?latex=%5Bx%2Cy%5D%5ET&bg=ffffff&fg=323232&s=0&c=20201002) measurements from a GPS?
measurements from a GPS?



 . For a linear, time-invariant system, the Observability check is:
. For a linear, time-invariant system, the Observability check is:
 is the rank of the state matrix,
is the rank of the state matrix,  . For our simple
. For our simple ![[x,y,\theta]^T](https://s0.wp.com/latex.php?latex=%5Bx%2Cy%2C%5Ctheta%5D%5ET&bg=ffffff&fg=323232&s=0&c=20201002) system,
system, 
 because that represents the control input, which is not used in the observability derivation. Now, even though the system itself is non-linear, a Kalman filter is by nature a linear observer and I have linearized the measurement in order to use the Kalman filter equations. Therefore, the above observability test should hold using the known
because that represents the control input, which is not used in the observability derivation. Now, even though the system itself is non-linear, a Kalman filter is by nature a linear observer and I have linearized the measurement in order to use the Kalman filter equations. Therefore, the above observability test should hold using the known  ). So in conclusion, an Extended Kalman Filter with the state equal to
). So in conclusion, an Extended Kalman Filter with the state equal to  to include velocity states
to include velocity states

 is the true state,
is the true state,  is the GPS measurement:
is the GPS measurement:

 is the estimated heading. In order to correctly propagate uncertainty in our Kalman filter, this H matrix would have to be linearized using a Jacobian according to the Extended Kalman Filter equations. I dont believe we’ve ever done this correctly before, causing the covariance matrices in our EKF to be incorrect. So, I decided to apply my particle filter simulation to see if it could handle a GPS with a lever arm offset… After about 30 minutes (further evidence of the ease-of-use for Particle Filters), simulation results are qualitatively indistinguishable between GPS located directly on the origin and GPS with an offset.
is the estimated heading. In order to correctly propagate uncertainty in our Kalman filter, this H matrix would have to be linearized using a Jacobian according to the Extended Kalman Filter equations. I dont believe we’ve ever done this correctly before, causing the covariance matrices in our EKF to be incorrect. So, I decided to apply my particle filter simulation to see if it could handle a GPS with a lever arm offset… After about 30 minutes (further evidence of the ease-of-use for Particle Filters), simulation results are qualitatively indistinguishable between GPS located directly on the origin and GPS with an offset. to calculate the probability that a single particle produced the generated measurement. Resampling then narrows the particle pool to include only those particle most probable to actually be true. The figure below shows the final result of a robot driving around in a circle, using GPS on the origin (left) and GPS with a 0.4 m offset (right).
to calculate the probability that a single particle produced the generated measurement. Resampling then narrows the particle pool to include only those particle most probable to actually be true. The figure below shows the final result of a robot driving around in a circle, using GPS on the origin (left) and GPS with a 0.4 m offset (right).
 . So, it appears that we should be able to easily use a particle filter to fuse the
. So, it appears that we should be able to easily use a particle filter to fuse the 